Validation of Collision Risk Estimation in Intersection Crossings
Anshul Paigwar, Alessandro Renzaglia, Christian Laugier (INRIA - Team CHROMA)
|
Problem:
|
Nowadays, a large number of Automated Cyber-Physical Systems (ACPS) are based on probabilistic algorithms.
Validation of such systems is a crucial but complex task. |
- In this work we validated CMCDOT, a probabilistic occupancy grid framework, developed at Inria, which also estimates risk of collision in near future.
- We use CARLA simulator to model the ego-vehicle and its sensors, as well as other vehicles in diverse intersection crossing scenarios.
- To validate the CMCDOT algorithm, we define appropriate Key Performance Indicators (KPIs) and create large number of simulations to evaluate the probability of meeting the defined KPIs. For the evaluation we use Plasma Lab, a statistical model checking platform.
Attentional PointNet for 3D Object Detection in Point Clouds
Anshul Paigwar, Ozgur Erkent, Christian Wolf and prof. Christian Laugier (INRIA - Team CHROMA)
|
Problem:
|
Real-time accurate detection of objects in 3D point clouds is a central problem for autonomous navigation. Most existing methods
require data from multiple sensors for the detection. Such methods are prone to sensor failure.
|
PyTorch implementation of PointWise Convolutional Neural Network
|
Problem:
|
Point cloud is an important type of geometric data structure. However, using point clouds with neural network for feature extraction and learning representation is an active topic of research.
|
|
Ground Estimation & Point Cloud Segmentation
Lukas Rummelhard, Anshul Paigwar, Amaury Negre, Christian Laugier ( INRIA - Team CHROMA )
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
Dynamic Object Detection and Tracking in Point Cloud
Anshul Paigwar, Zubin Priyansh, Pradyot Kvn (The Hitech Robotics Systems, Gurgaon, India)
|
Problem:
|
For Autonomous robots, Dynamic object detection and tracking is a crucial task for safer trajectory planning. Existing methods requires prior mapping of the environment or modeling of the objects which may not be very feasible.
|
|
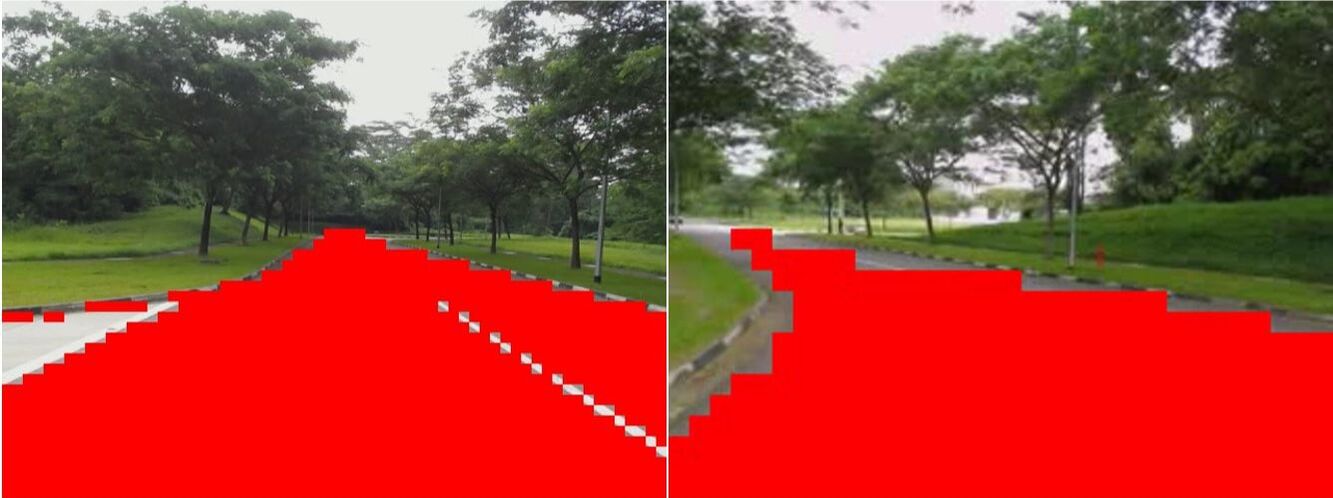
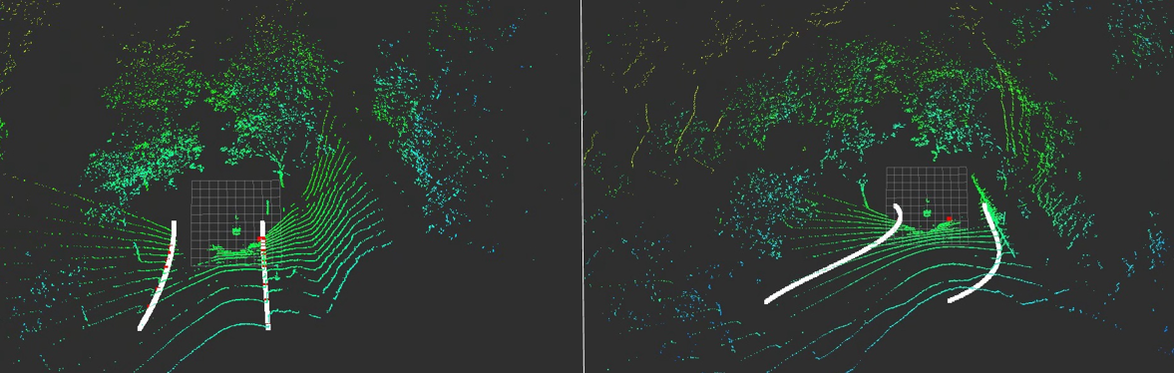
Road Boundaries Detection
Under supervision of Anthony Wong (Institute of Infocomm Research, Singapore )
|
Problem:
|
Accuracy of GPS can vary up to few meters, for Autonomous vehicles exact information of their location up to few centimeters in particular lane is important, detecting Road Boundaries and and combining this information with GPS is one good way to tackle this issue.
|
|
|
Localisation of Autonomous Vehicle using EKF
Under supervision of Anthony Wong (Institute of Infocomm Research, Singapore )
|
Problem:
|
Accuracy of GPS can vary up to few meters, while odometery data can drift as the vehicle moves, relying on single sensor for localisation will certainly be imprecise.
|
|
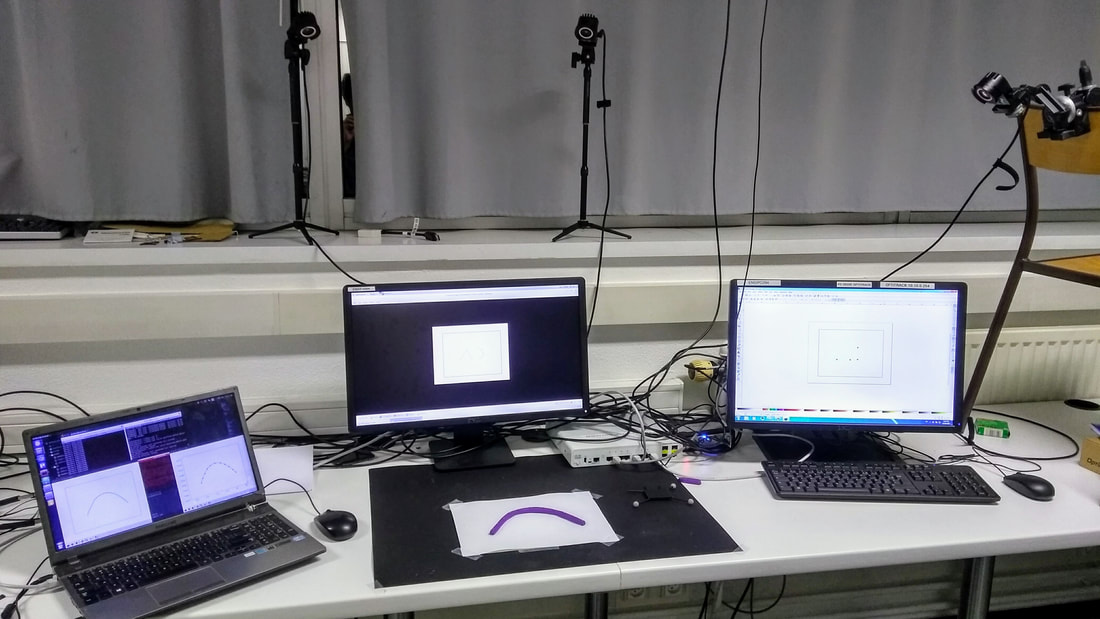
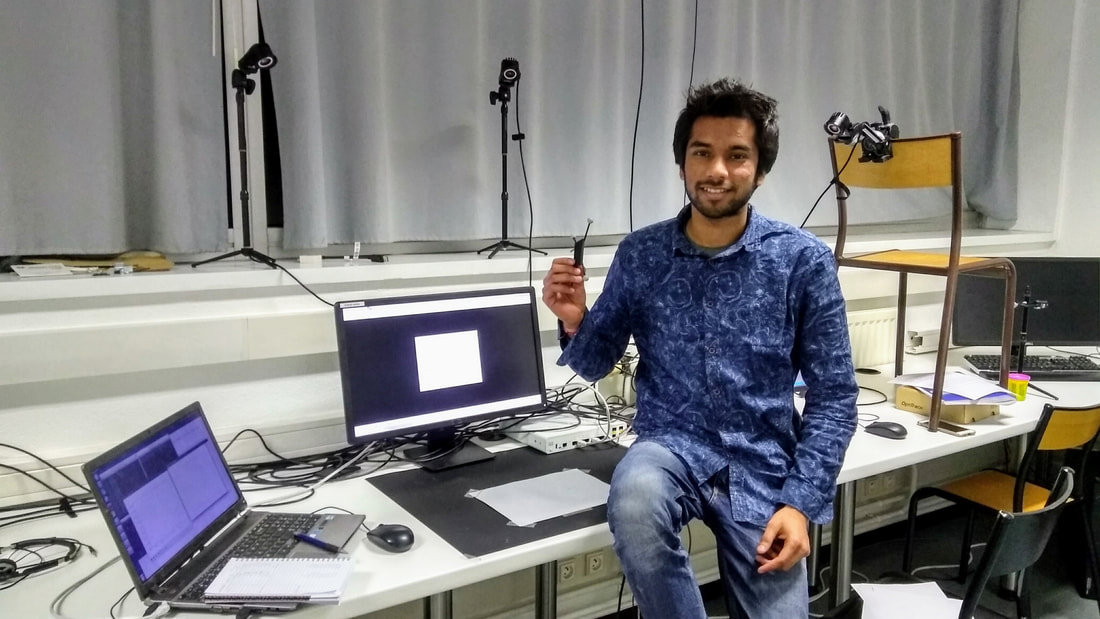
Drawing smooth contour using tangible input device
Anshul Paigwar, Laura Lassance (ENSIMAG, Univ. Grenoble Alpes, France)
|
Problem:
|
Drawing smooth contours using a computer drawing software can be at many times a challenging and time consuming task. Using a mouse - the traditional input method for these software becomes not intuitive due to its indirect input nature.
|
Omni- Directional Modular Snake Robot
Akash Singh, Anshul Paigwar, Sai Teja Manchukanti, Manish Saroya, Shital Chiddarwar ( IVLABS, Visvesvaraya National Institute of Technology, India )
|
Problem:
|
Control, state estimation and motion planning of highly articulated snake robots have been challenging tasks for researchers. As a result, formulating gaits for the modular structure, for motion on flat trajectories as well as overcoming obstacles is mathematically complicated.
|
|

Blind Navigator
An assistive wearable device for the blind
Anshul Paigwar, Sai Teja Manchukanti, K M burchandi
( IVLABS, Visvesvaraya National Institute of Technology, India )
|


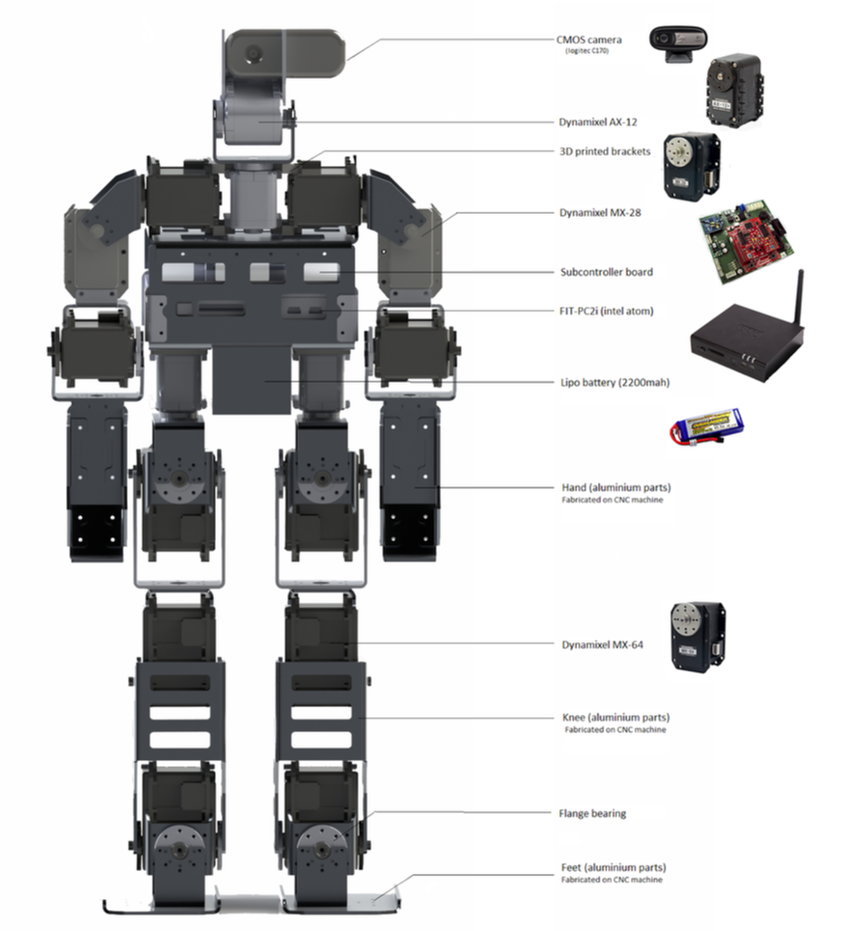
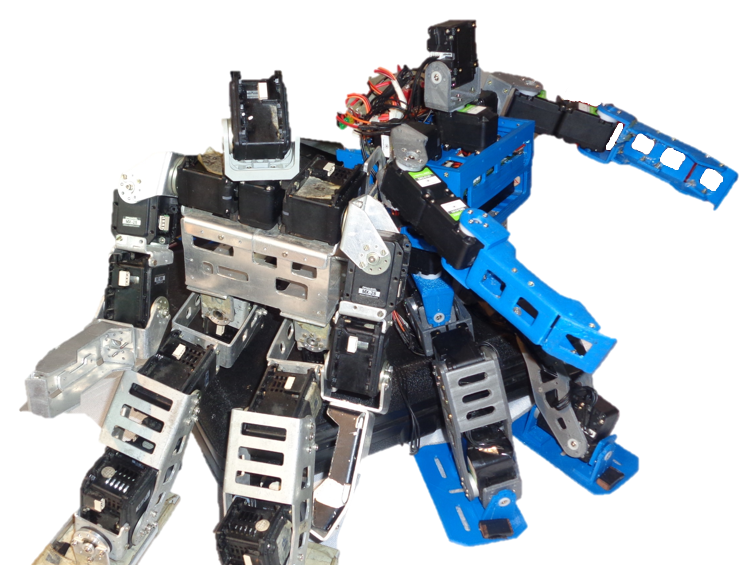
20 DOF Humanoid Robot
|
|
Trajectory Generation for Spray Painting Robot
Mayur Andulkar, Shital Chiddarwar, Anshul Paigwar ( Visvesveraya National Institute of Technology, India)
|
Problem:
|
The spray gun trajectory for robotic arm in an industry is usually handcrafted and specific to the part being painted. This process is tedious, time consuming.
|

|
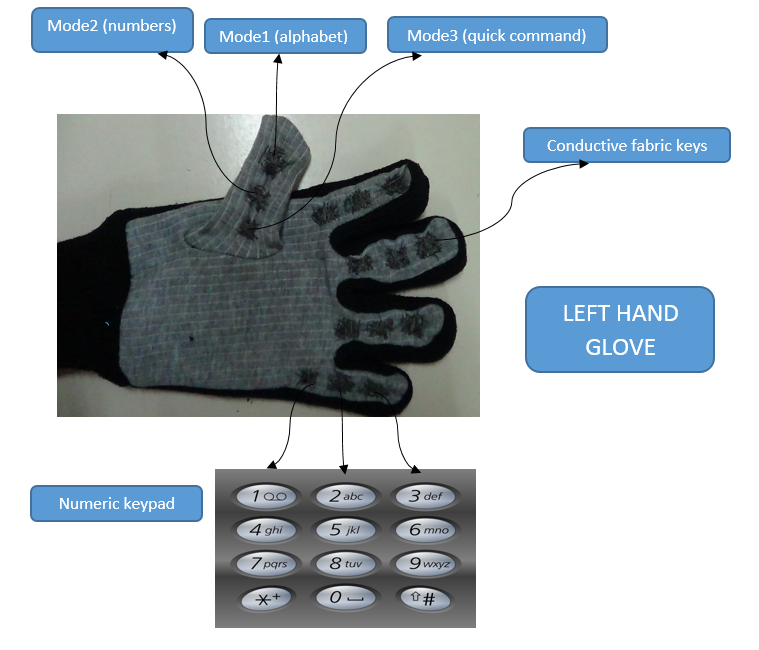
Design of a wireless glove based I/O interface
Anshul Paigwar, Prasad Vagdargi, Shaishav Vashi ( IVLABS, Visvesvaraya National Institute of Technology, Nagpur, India)
|
Problem:
|
Very less has been done to bridge the gap of communication between society and hearing and speaking disabled.
|
|
|
|
|
Writing Arm
Anshul Paigwar, Prasad Vagdargi, Shivam Shrivastav ( IVLABS, Visvesvaraya National Institute of Technology, India )
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
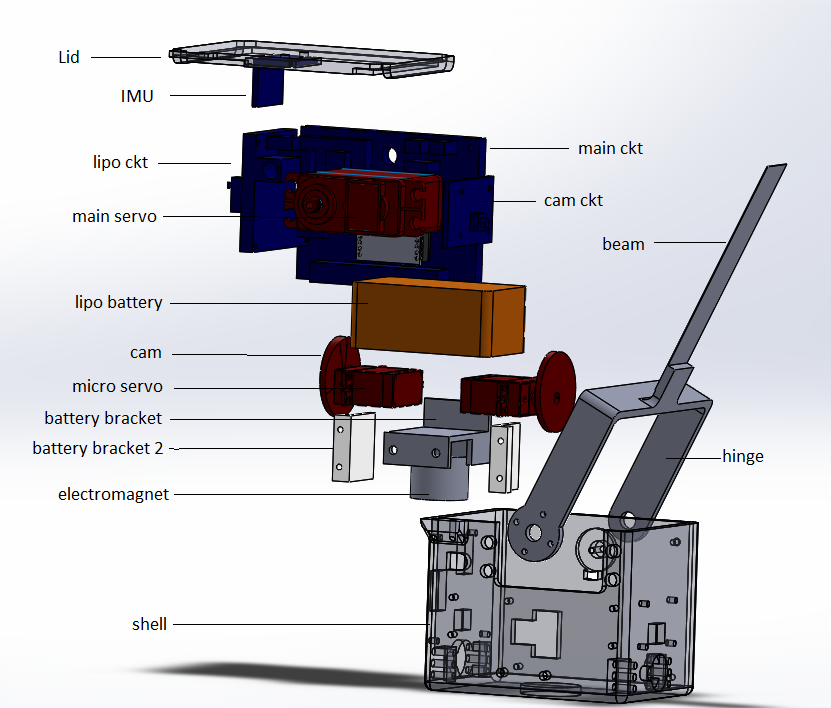
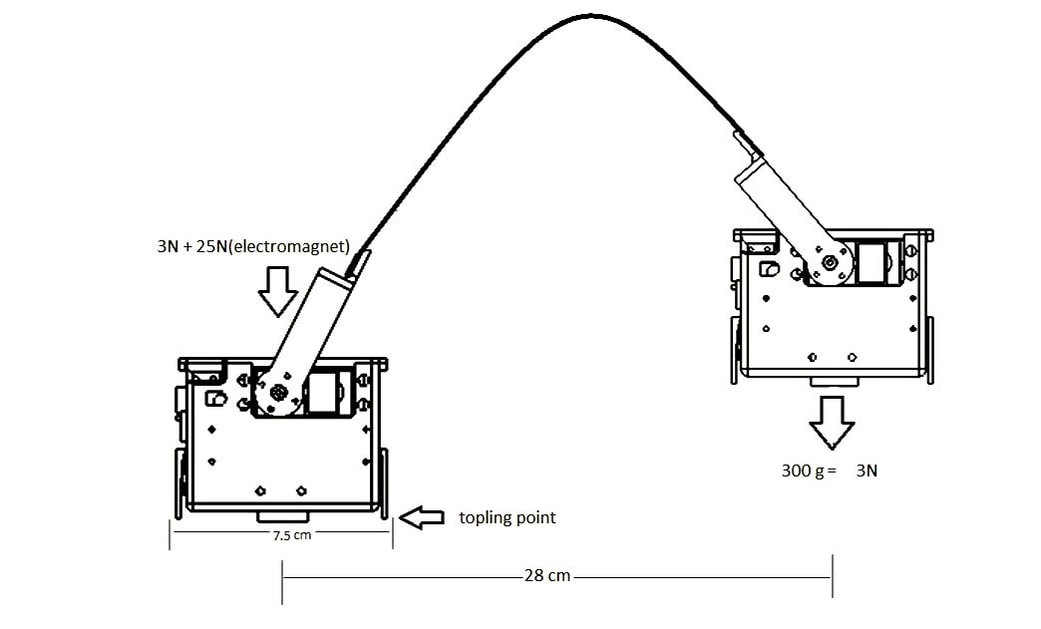
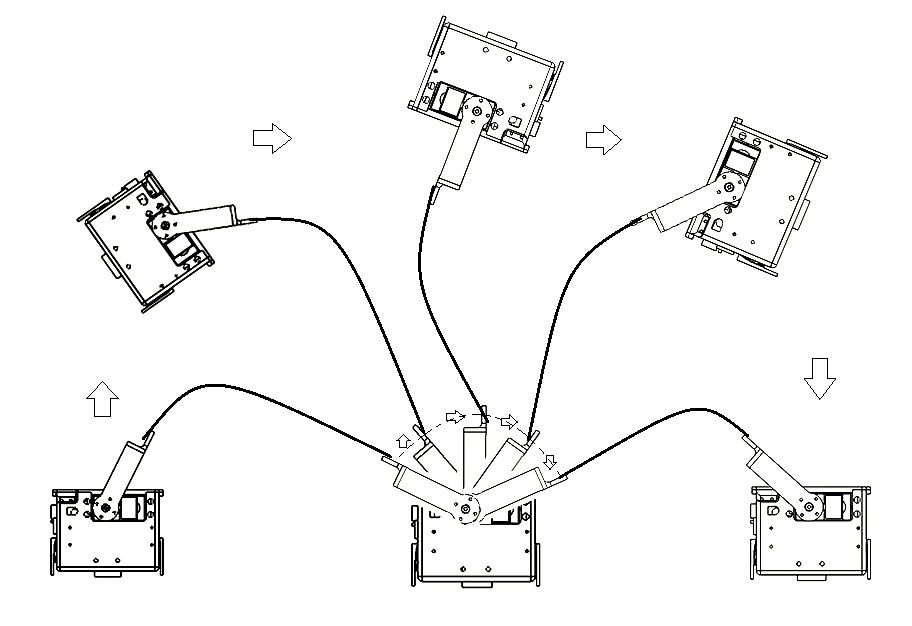
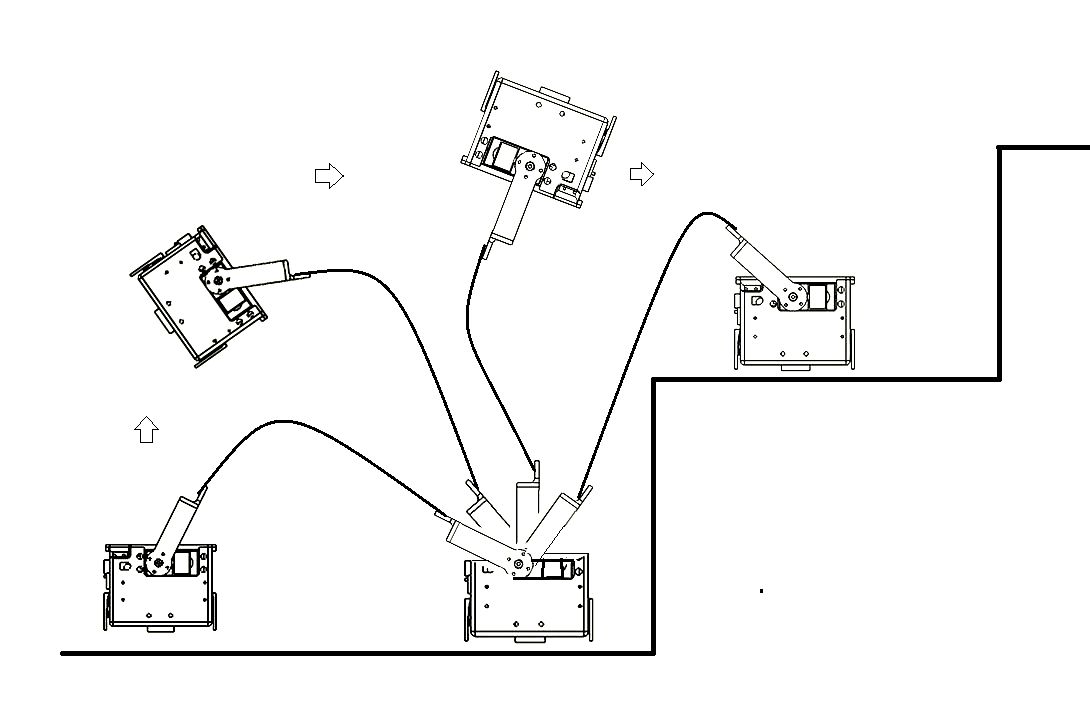
Design of Leech Robot
Under the supervision of Prof. Prasanna Gandhi ( Indian Institute of Technology, Bombay, India )
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
|
|
|
Line Follower Robot
Visvesvaraya National Institute of Technology, India
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
Hydraulic Crane using Syringes
Anshul Paigwar, Varun Gupta ( Visvesvaraya National Institute of Technology, India)
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
Projects Assisted
ReBiS - Reconfigurable Bipedal Snake Robot
Rohan Thakker, Ajinkya Kamat, Sachin Bharambe, Shital Chiddarwar, KM Bhurchandi ( IVLABS, Visvesvaraya National Institute of Technology, India)
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
Low cost Underactuated Robotic hand
Parag Khanna, Khushdeep Singh, K. M. Bhurchandi, Shital S. Chiddarwar ( IVLABS, Visvesvaraya National Institute of Technology, India)
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
Garuda Drone Delivery System
Shubhanshu Gupta, Pranay Pourkar, Vedant Ranade, Anish Gupta, Aditya Bastapure, Akshay Kulkarni, Amit Balki, Shital Chiddarwar
( IVLABS, Visvesvaraya National Institute of Technology, India)
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
Low cost Portable e-Braille Reader
Deba Prakash Nayak, Abhishek Tommy, Sumedh Warade, Vivek Patel, Sai Teja Manchukanti, A. S. Gandhi
(IVLABS, Visvesvaraya National Institute of Technology, India)
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
Butler Bot - An Omni-directional Mobile Robot
Akash Singh, Sai Teja Manchukanti, Manish Saroya, Manish Maurya, K. M. Burchandi (IVLABS, Visvesvaraya National Institute of Technology, India)
|
Problem:
|
Realtime Ground estimation and extraction of ground points is a critical pre-processing task for object detection and-tracking system or to generate proper occupancy grids for autonomous navigation.
|
|
