Key Projects

Validation of Collision Risk Estimation for Autonomous Vehicles |
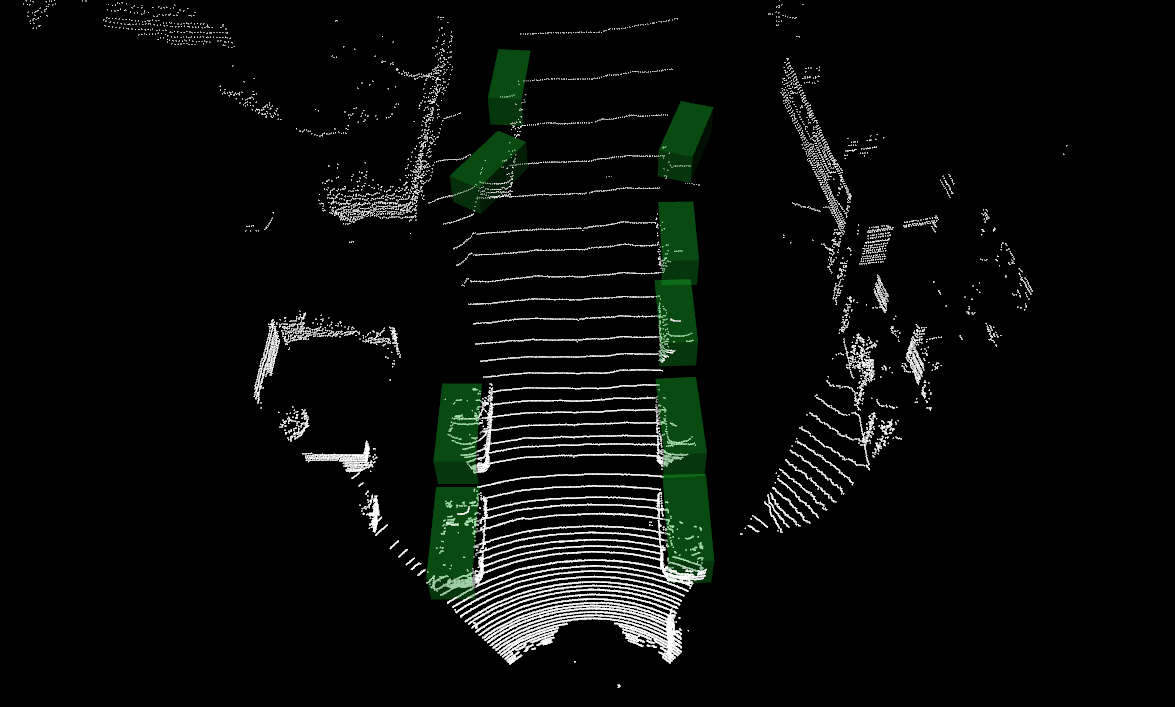
Attentional - PointNet object detection in point clouds |
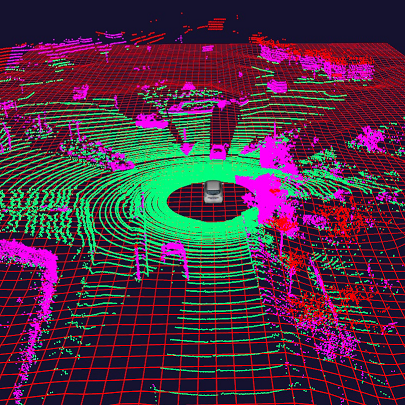
Ground Estimation & Point-cloud Segmentation |
Humanoid
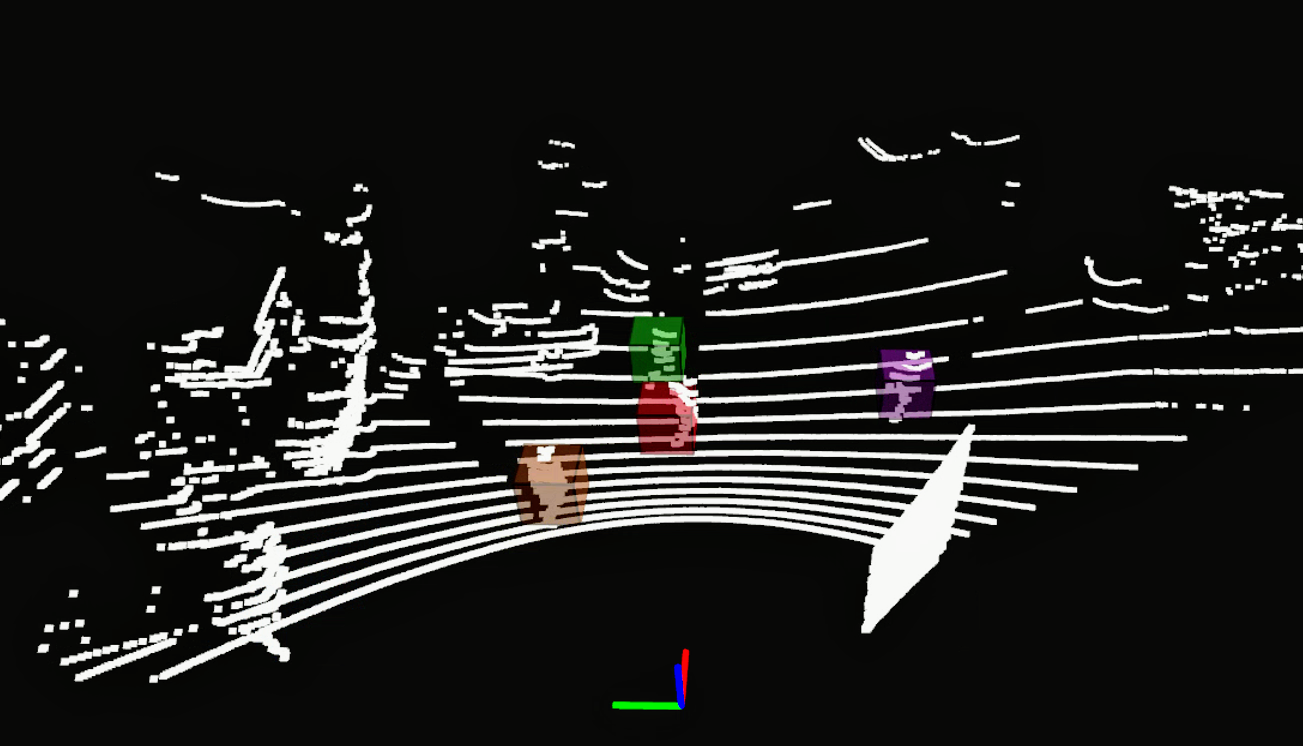
Dynamic Object Detection and Tracking in point clouds |
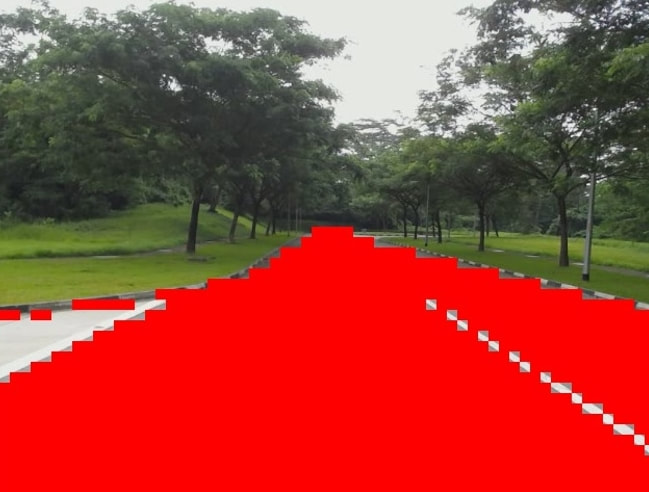
Road Detection using Camera and LiDAR |

Humanoid
EKF based Localization of Autonomous Vehicle |

Omni-directional Snake Robot (OSMOS) |
Humanoid
SWAYAT 20 DOF Humanoid Robot |
Recent Publications
|
CVPR '19
|
Attentional PointNet for 3D Object Detection in Point Clouds
Anshul Paigwar, Ozgur Erkent, Christian Wolf, Christian Laugier In the workshop proceeding of CVPR 2019, Long Beach, California, USA |
|
IV '20
|
Probabilistic Collision Risk Estimation for Autonomous Driving: Validation via Statistical Model Checking
Anshul Paigwar, Eduard Baranov, Alessandro Renzaglia, Christian Laugier, Axel Legay IV 2020 - 31th IEEE Intelligent Vehicles Symposium, Oct 2020, Las Vegas, USA |
Experiences
|
Oct 18 - Present
|
Research Engineer
INRIA- France Working on Pedestrian detection in 3D point clouds using deep learning to fuse sensor data from LiDAR, RGB and Event Camera. Developed 'GndNet' a new deep learning based architecture for Ground Plane Estimation and Semantic Segmentation of 3D point cloud. Achieved state-of-the-art accuracy with a runtime of 65 Hz. Worked with CARLA simulator to generate high fidelity intersection crossing scenarios for Autonomous Vehicles to validate Collision Risk Estimation using Statistical Model Checking. |
|
Feb 18 - Sept 18
|
Master Thesis
INRIA- France Worked on 'Attentional PointNet' a new deep Neural Network architecture for 3D Object Detection in point clouds. |
|
April 17 - Aug 17
|
Research Engineer (Short Term)
Hitech-Robotics System, India Worked on developing algorithms for Dynamic Object Detection and Tracking in point clouds from stereo cameras and LiDARs. |
|
May 16 - Dec 16
|
Research Intern (Bachelor)
INRIA- France Worked on CRF based ground plane modeling and ground elevation estimation using 3D point clouds for Autonomous Vehicles. |
|
May 15 - July 15
|
Research Intern
Institute of Infocomm Research, Singapore Worked on Road Boundaries detection using camera and LiDAR sensor fusion. Worked on EKF based fusion of GPS and odometry data for the Localization of Autonomous Vehicles. |
|
May 14 - July 14
|
Research Intern
Indian Institute of Technology - Bombay, India Worked on development of Leech inspired Bio-Robot for stair climbing. |
Skills
|
Programming
|
Tools
|
Languages
|
|
Python
|
|
PyTorch
|
|
English
|
|
|
C++
|
|
ROS
|
|
Hindi
|
|
|
CUDA
|
|
PCL
|
|
Others
|
|
Embedded C
|
|
CAD
|
|
Technical Writing
|
|
|
Matlab
|
|
OpenCV
|
|
MS Office
|
|
Academia
|
ENSIMAG, Univ. Grenoble-Alps,
France |
Visvesvaraya National Institute of Technology (VNIT), India
|
Hislop College - Nagpur,
India |
Master of Science
Graphics, Vision and Robotics 2017 - 2018 GPA : 14.97/20 US-Grade - A |

Bachelor of Technology
Mechanical Engineering 2012 - 2016 GPA : 7.21/10 |
|


Leadership Experience
CO-Founding IVLABS
|

Setting up a Maker's SpaceTo realise our robotics dream we worked on building basic infrastructure like lab space, hardware tools, equipment and gathering funds.
|

Teaching robotics to everyone
We transfer knowledge and inspire students through various workshops to explore new domains thus creating new leaders to propel the innovation.
|

Building up cool robots !!
At IVLABS we seek to develop unique approaches, innovative thinking, identify new problems and try to solve them by building cool robots!!
|
